Контактные данные
Данный запрос не является заказом и ни к чему вас не обязывает!
Как использовать сенсор для анализа тепловых режимов силового модуля
Многие современные силовые модули имеют в своем составе датчик температуры, как правило, чип-резистор, установленный на изолирующей DBC-подложке. В первую очередь это необходимо для работы схемы защиты от перегрева, но есть и еще один законный вопрос: можно ли использовать встроенный сенсор для определения «виртуальной» температуры кристаллов? Существует несколько вариантов решения проблемы, зависящих от требуемой точности и цели измерения. В данном руководстве описаны два возможных метода, отличающихся сложностью реализации.
Пояснения даются на примере трехфазного двухуровневого IGBT-инвертора, но все сказанное применимо и к другим схемам и полупроводниковым приборам. Описанные методики расчета относятся к встроенным датчикам температуры, однако они пригодны и при использовании внешних сенсоров (например, установленных на радиаторе). Предполагается, что расчеты реализуются с помощью цифрового процессора, находящегося на плате управления.
Основная цель измерения температуры силовых модулей — защита полупроводниковых кристаллов от перегрева. При их медленном нагреве (например, при повышении температуры окружающей среды или небольших, но длительных перегрузках) термозащита обеспечивается путем сравнения показаний датчика с заданным (на стадии проектирования) предельным состоянием. Для динамических нагрузок можно формировать кривые профиля мощности, которые определяют допустимый выходной ток при заданной температуре (например, возможное повышение нагрузки при снижении температуры окружающей среды).
Максимальная выходная мощность системы в заданной рабочей точке зависит от множества факторов, в том числе внешних (температура окружающего воздуха, высота над уровнем моря) и электрических (основная частота выходного сигнала). Можно определить предельный ток для каждого конкретного состояния системы, исключающий перегрев кристаллов. Однако такой подход сопряжен с риском сокращения срока службы силового модуля, поскольку он не учитывает воздействие термомеханических стрессов при циклическом изменении мощности [2].
| Упрощенное решение для квазистационарных условий | Комплексное решение для кратковременных высоких перегрузок и режима опрокидывания крутящего момента |
| Расчет потерь в одном транзисторе при условии, что все ключи в симметричной цепи имеют равные потери (например, трехфазный IGBT-инвертор). | Расчет потерь для всех ключей в соответствии с фактическими режимами работы схемы (VCC, Vout, Iout, cos(φ), fsw, Tj). |
| Требуется только одна тепловая модель «Tj – сенсор Tr» на ключ (FWD и IGBT) | Расчет температуры с использованием матрицы Zth(jr), учитывающей связь всех ключей |
| Частоты дискретизации порядка 100 мс — 1 с, что позволяет использовать Rth вместо Zth. | Частота дискретизации порядка 1/fsw (или кратные этой величие). |
| Результат: средние потери для периодической функции и средние значения температуры кристаллов. | Результат: мгновенные значения потерь и температуры кристаллов. |
| Поправочный коэффициент для учета температурной пульсации на низкой частоте выходного сигнала. | Изменения температуры на выходной частоте инвертора рассчитываются в режиме реального времени. |
| Формирование кривой огибающей температуры, используемой для защиты от перегрева. | |
| Преимущества: малые вычислительные мощности и малый объем данных. | Преимущества: возможна защита на низкой частоте огибающей или при опрокидывании момента. Доступна информация о параметрах температурного цикла. |
| Недостатки: Ограниченные возможности защиты при опрокидывании момента или при кратковременных высоких перегрузках. Нет информации для расчета параметров термоцикла. | Недостатки: Сложность реализации модели. Требуется высокая вычислительная мощность. Большой объем данных. |
Большинство ресурсных моделей, учитывающих фактор термоциклирования, основано на значении средней температуры Tm и количестве перепадов температуры кристалла dTj (раздел 2.7.6 [2]). Теоретически это означает, что система, способная вычислять и хранить фактическое значение Tj в процессе работы, может использовать ресурсную модель для определения «оставшегося срока службы» силового модуля. Однако на практике это труднодостижимо из-за низкой достоверности ресурсных моделей в сочетании со сложностью (и стоимостью) хранения и обработки данных в условиях реального применения.
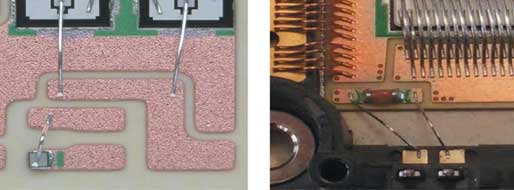
Современные силовые полупроводниковые модули содержат термочувствительный сенсор (термистор NTC или PTC), припаянный к изолирующей DBC-подложке. Из-за компоновочных ограничений (требования по напряжению изоляции), он может быть установлен только в определенных зонах, поэтому показания датчика (Tr), как правило, не соответствуют фактическому нагреву кристалла IGBT или диода.
В модулях SEMIKRON температура сенсора считается приближенной к одной из контрольных точек определения теплового сопротивления Rth (Tc — корпус или Ts — радиатор). Например:
Однако данное упрощение следует использовать с осторожностью, поскольку показания сенсора зависят от ряда факторов. Так, в некоторых случаях Tr оказывается ниже, чем температура радиатора под наиболее нагретым чипом.
Термодатчик можно рассматривать как узел в упрощенной тепловой схеме Фостера. Если нужна только защита от перегрева при медленно изменяющихся нагрузках и Tr ≈ Ts, то для оценки температуры кристалла Tj используется величина теплового сопротивления Rth(j–s), определенная в спецификации, с некоторым запасом для надежности. Для получения более точных результатов в динамических режимах следует определить тепловой импеданс Zth(j–r).
Почему значений Rth(j–r)/Zth(j–r) нет в спецификациях модулей?
Температура датчика и результирующий тепловой импеданс «кристалл-сенсор» зависят от многих факторов, не связанных с конструкцией самого модуля. Основное влияние на распространение температуры в горизонтальной плоскости и вертикальную теплопроводность системы оказывают параметры радиатора и рабочие режимы системы.
Параметры радиатора
Распределение тепла под модулем зависит от следующих факторов:
По этой причине для силовых полупроводниковых ключей в спецификации указывают значения тепловых сопротивлений Rth(j–s) и Rth(j–c), а не Rth(j–r). Исключением являются модули, которые производятся, квалифицируются и поставляются вместе с радиатором (например, IPM SKiiP).
Режимы работы системы
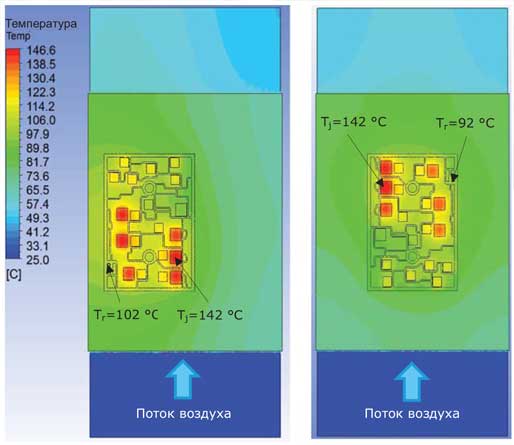
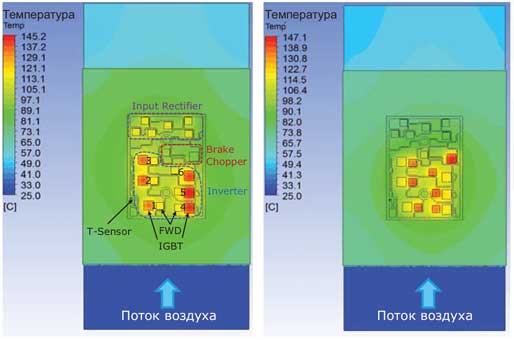
Рабочие режимы определяют величину и распределение потерь между ключами, входящими в модуль. На рис. 3 показаны результаты теплового моделирования приводного модуля MiniSKiiP CIB (Converter-InverterBrake) 50 A/1200 В на радиаторе с воздушным охлаждением (Ta = +25 °C, Rth(s–a) ≈ 0,13 К/Вт). В левой части рисунка модуль работает в «инверторном» режиме (22 кВт, cos ϕ = 0,85), отличающемся высокой нагрузкой на IGBT и питании DC-цепи от входного выпрямителя. Справа — тот же модуль в «тормозном» режиме (22 кВт, cos ϕ = –0,85), когда энергия торможения рассеивается во внешнем резисторе. Датчик температуры находится в левом нижнем углу подложки.
Как видно из таблицы 2, тепловое сопротивление датчика очень сильно зависит от режима работы. Кроме того, Rth(j–r) может значительно отличаться от Rth(j–s), то есть упомянутое ранее предположение, «Tr ≈ Ts» не всегда справедливо (табл. 3).
| Контрольные точки определения Rth(j–r) | Rth(j–r), инверторный режим | Rth(j–r), тормозной режим |
| «самый нагретый IGBT — сенсор» | 0,81 К/Вт (IGBT 5) | 0,73 К/Вт (тормозной IGBT) |
| «самый нагретый FWD — сенсор» | 2,25 К/Вт (диод 5) | 1,18 К/Вт (диод 2) |
| «самый нагретый выпрямительный диод — сенсор» | 0,96 К/Вт (диод 9) | Нет потерь |
| Параметр | Инверторный режим (cos ϕ = 0,85). Потери: IGBT — 60 Вт, FWD — 12 Вт, выпрямительный диод — 20 Вт. |
| Rth(j–r): «самый нагретый IGBT — сенсор» | 0,81 К/Вт (IGBT 5) |
| ΔT(j–r)_IGBT | 60 Вт × 0,81 К/Вт = 48,6 К |
| Rth(j-s)_IGBT (спецификация) | 0,71 К/Вт |
| Расчет ΔT(j–r)_IGBT (при условии Ts ≈ Tr) | 60 Вт × 0,71 К/Вт = 42,6 К (–6 К) |
| Расчет Rth(j–r): «самый нагретый FWD — сенсор» | 2,25 К/Вт (диод 5) |
| ΔT(j–r)_FWD | 12 Вт × 2,25 К/Вт = 27К |
| Rth(j–s)_FWD (спецификация) | 0,95К/Вт |
| Расчет ΔT(j–r)_FWD (при условии Ts ≈ Tr) | 12 Вт × 0,95 К/Вт = 11,4К (–15,6 К) |
| Расчет Rth(j–r): «самый нагретый выпрямительный диод — сенсор» | 0,96 К/Вт (диод 9) |
| ΔT(j–r)_ выпрямительный диод | 20 Вт × 0,96 К/Вт = 19,2 К |
| Rth(j–s)_ выпрямительный диод (спецификация) | 0,9 К/Вт |
| Расчет ΔT(j–r)_FWD (при условии Ts ≈ Tr) | 20 Вт × 0,9 К/Вт = 18 К (–1,2 К) |
Методы измерения
По причинам, перечисленным выше, тепловое сопротивление/импеданс «кристаллрадиатор» должно определяться для каждого конкретного приложения. Существует три экспериментальных метода измерения величины Rth между IGBT или диодом и термодатчиком. Полученные результаты следует сравнить с компьютерной моделью, созданной методом конечных элементов, для верификации и упрощения определения Rth в других условиях эксплуатации.
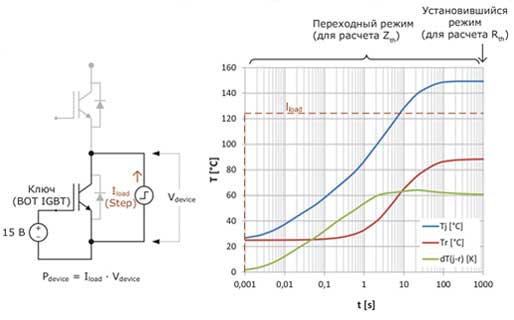
В процессе испытаний через каждый транзистор пропускается ток и производится измерение температуры сенсора и соответствующего ключа (рис. 4). Величина Rth(j–r) фиксируется в установившемся режиме при заданной нагрузке. При измерении Zth(j–r) ток увеличивается ступенчато, а температура непрерывно измеряется датчиком. Для расчета потерь используются значения тока Iload и напряжения Vdevice на ключе. На практике применяется понижающая функция (отключение мощности), а измеренные значения затем инвертируются, поскольку это единственный способ достичь устойчивого состояния для температурно-зависимых потерь.

Использование термопары
Для проведения тестов изготавливается специальный модуль с термопарами, приклеенными к поверхности чипов с помощью теплопроводящей эпоксидной смолы (рис. 5). Регулируемый постоянный ток (при низком напряжении) пропускается через IGBT или диод. Для расчета градиента температуры и теплового сопротивления используются показания термопары и датчика:
Rth(j-r)=( Tj-device_thermocouple-Tr ) / Pdevice
Из-за медленной реакции термопар с их помощью возможно определение только статического значения Rth(j–r). Кроме того, они сами вносят погрешность +5…+15 °C, поскольку металлический провод на поверхности чипа действует как радиатор. К тому же из соображений безопасности приходится изолировать термопары в местах их соединения.
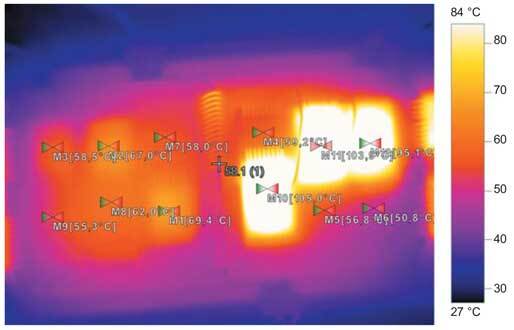
Анализ теплового профиля с помощью инфракрасной камеры производится на специально подготовленном модуле без крышки и без заливки силиконовым гелем.
Внутренняя поверхность модуля покрывается матовой краской с равномерной излучающей способностью, чтобы не было отражения. Регулируемый постоянный ток (при низком напряжении) пропускается через IGBT или диод; температура, измеряемая камерой и датчиком, используется для расчета градиента и теплового сопротивления (рис. 6):
Rth(j-r)=( Tj-device_IR_camera-Tr ) / Pdevice
При правильной калибровке инфракрасная камера высокого разрешения дает точные показания, хотя и с достаточно низкой частотой обновления, что позволяет определить только статическое тепловое сопротивление Rth(j–r). Кроме того, использование инфракрасной камеры в модулях с внутренней DC-шиной (например, стандартные IGBT 62 мм) затруднено, поскольку некоторые чипы находятся под DC-терминалами.
Контроль VCE(sat) (Rth и Zth)
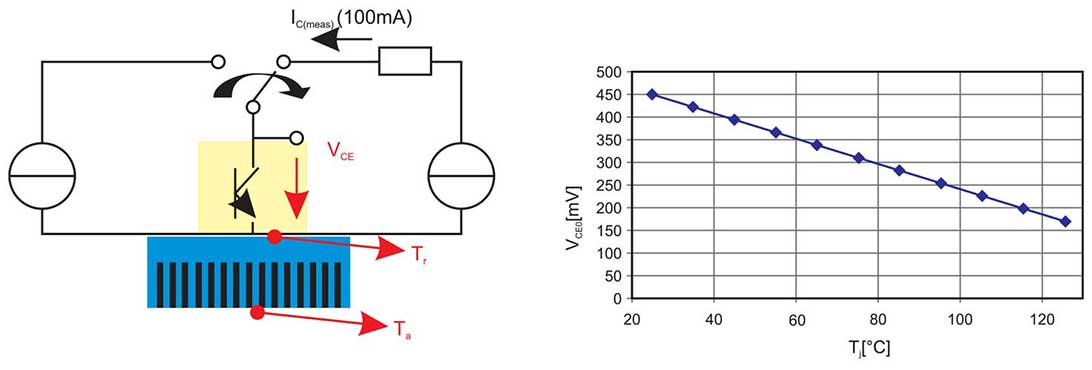
Особенностью полупроводниковых приборов является линейная зависимость между температурой кристалла Tj и прямым падением напряжения (VCE/Vf) на малых токах.
Равномерно нагревая модуль в лабораторных условиях, можно получить калибровочную кривую для каждого конкретного элемента (рис. 7). Модуль помещается на испытательный стенд (схема на рис. 7), где на него подаются сильноточные импульсы, создающие потери. Непосредственно после отключения импульсов через кристалл пропускается малый фиксированный ток (100 мА) и выполняется измерение прямого напряжения и определение температуры Tj по калибровочной кривой.
Этот метод обеспечивает очень точные результаты и широко используется ведущими производителями силовых модулей для определения динамического теплового импеданса Zth(j–r) «кристалл-сенсор».
Метод конечных элементов (Rth и Zth)
Анализ методом конечных элементов (FEA — Finite Element Analysis) производится путем компьютерного моделирования системы «модуль-радиатор». Для создания подобной модели необходима следующая информация, которую предоставляет производитель модуля:
Использование FEA модели позволяет при известном значении потерь рассчитать температуру кристаллов, радиатора и термодатчика. Данный метод следует применять совместно с одним из других видов испытаний для верификации точности модели (и наоборот).
Интегральное решение позволяет вычислить среднюю рассеиваемую мощность за период PD (например, период основной частоты Fout для ШИМ-инвертора), представляющую собой сумму статических Pcond и динамических потерь Psw. Частота дискретизации при этом низкая, она находится в диапазоне от 10/fout до 1 с, таким образом при расчетах допускается использование статического теплового сопротивления Rth(j–r). Потери зависят от температуры, поэтому расчет требует нескольких итераций, где в качестве дополнительного входного сигнала берется Tj. Если величина PD не изменяется от одного временного шага к другому (или меняется незначительно), то применяется значение Tj из предыдущего расчетного цикла.
Необходимые параметры схемы (пример трехфазного инвертора)
Irms — среднеквадратичное значение выходного ток на основной частоте сигнала;
M — коэффициент модуляции;
cos(ϕ) — коэффициент мощности;
Vcc — напряжение DC-шины;
fsw — частота коммутации;
fout — основная частота выходного сигнала.
Расчет потерь
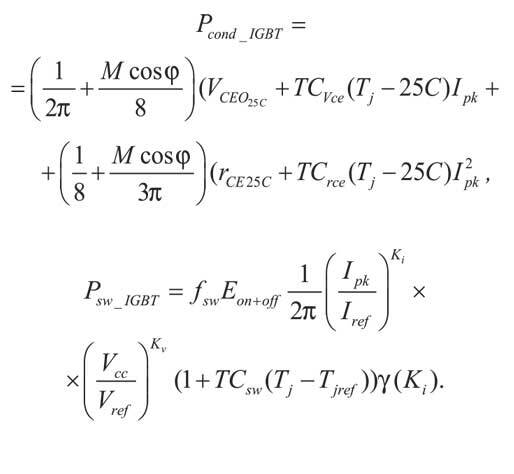
Потери IGBT в составе трехфазного ШИМ-инвертора (за один период):
Потери FWD в составе трехфазного ШИМ-инвертора (за один период):
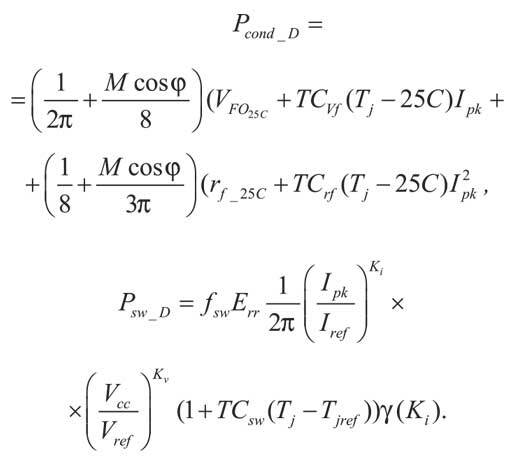
где:
Ki — степенной коэффициент коррекции зависимости потерь от тока (IGBT ≈ 1, FWD ≈ 0,6);
Kv — степенной коэффициент коррекции зависимости потерь от напряжения (IGBT ≈ 1,35, FWD ≈ 0,6);
TCsw — температурный коэффициент (IGBT ≈ 0,003, FWD ≈ 0,006);
γ ( Ki) — интеграл ∫ϕn+ϕsinKi(a-ϕ)da (IGBT:γ(1)=2, FWD:γ(0,6) = 2,3).
Следующие параметры приводятся в технических спецификациях:
Упрощенный метод, основанный на одиночном статическом измерении теплового сопротивления каждого ключа, не учитывает эффект тепловой связи между ними. Следовательно:
1. Тестируемый чип (IGBT или FWD) должен располагаться максимально близко к датчику.
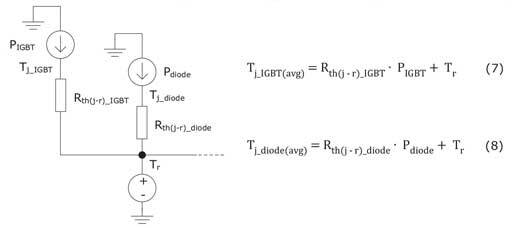
2. Метод справедлив только для схем со сбалансированными потерями (например, трехфазный инвертор в номинальном режиме работы). Он не подходит для режима остановки привода (когда полумост работает как понижающий преобразователь, а вот IGBT находится далеко от сенсора). Здесь используется стандартная схема Фостера с тепловыми сопротивлениями, привязанными к измеренной температуре датчика Tr на данном временном шаге (рис. 8).
Вычисление температуры датчика на одном временном шаге (выборка) — это итерационный процесс, поскольку многие параметры чипа являются термозависимыми.
Коэффициент коррекции на низких частотах огибающей
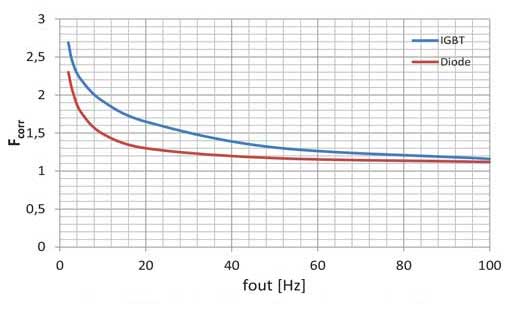
Описанный выше метод позволяет вычислить средний нагрев кристаллов, но не определяет пиковые значения, возникающие при колебаниях температуры на основной частоте выходного сигнала. Главным образом это относится к работе привода на низких частотах (< 10 Гц) или пусковому режиму. Для корректировки рассчитанных средних значений используется простой поправочный коэффициент (рис. 10), зависящий от теплового сопротивления применяемых приборов.
Следовательно, максимальная температура кристалла с учетом пульсаций на низкой частоте огибающей:
Tj_IGBT(max) = Fcorr_IGBT × Rth(j–r)_IGBT × PIGBT + Tr
Tj_FWD(max) = Fcorr_FWD × Rth(j–r)_FWD × PFWD + Tr